在现代工业和自动化领域 关节机器人手臂 发挥着至关重要的作用。凭借其灵活性和高精度,它被广泛应用于制造、医疗保健、航空航天等行业。特别是在注塑成型工艺中,机械手臂对于提高生产效率、降低劳动力成本和简化制造流程至关重要。但关节型机械手臂究竟是如何工作的呢?本文将探讨其工作原理、结构以及在注塑成型中的应用,帮助您更好地了解这项先进的机器人技术。
什么是关节型机器人手臂?
关节型机械臂是一种由多个旋转关节组成的机械臂,可在三维空间中灵活运动。与传统的线性机器人不同,关节型机械臂使用多个关节(也称为自由度或 DOF)来实现精确而复杂的运动。这些关节通过链接相连,机械臂可在其运动范围内自由移动。
旋转关节使机械臂能够在不同方向上运行,从而能够执行复杂的任务。每个关节都可以独立控制,使机械臂能够在不同的环境中执行精确的动作。

关节型机械臂如何工作?
1. 控制关节和自由度
关节型机械臂通过控制关节的旋转来工作,每个关节都由一个电机驱动。这样就能精确定位和移动物体。
自由度 (DOF) 是指一个关节可以移动的独立方向的数量。一个典型的 6-DOF 机械臂可以在三维空间中自由移动和旋转,以处理各种操作。
2. 传感器和控制系统
为确保精确运动,传感器在实时监控机械臂状态方面发挥着重要作用。这些传感器跟踪关节位置、负载、速度和温度等因素,向控制系统提供反馈,帮助动态调整机械臂的运动。
控制系统负责计算并向电机发送控制信号。常见的控制系统包括计算机数字控制系统和实时反馈控制系统。
3. 动力系统和执行器
铰接式机械臂的动力系统通常包括电机、气动装置或液压致动器。大多数工业机械臂使用伺服电机,可提供高精度和可靠的运动控制。
执行器是执行实际任务的机械部件,如抓手、焊枪或其他专用工具。执行器根据机器人控制系统的控制指令执行任务。
4. 编程和自动化
除硬件控制外,编程对于指导机械臂的运动也至关重要。通过编程,机器人可以根据预定任务执行复杂的运动序列。常见的编程方法包括示教编程(手动指导机器人学习动作)和离线编程(在计算机上编写程序并上传到机器人)。

关节型机械臂的应用
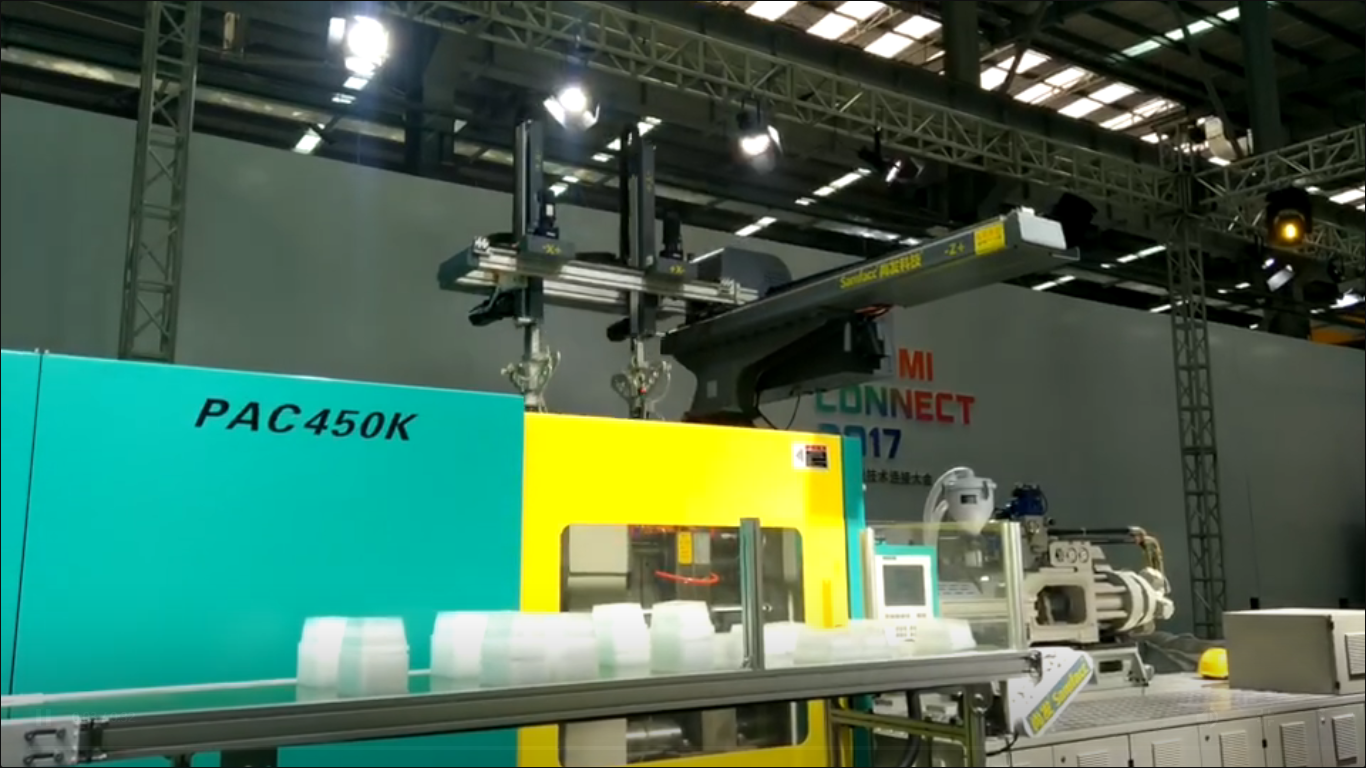
1. 简化注塑成型工艺
在注塑成型过程中,机械臂,如 高速机器人 SFK 系列这些机械臂可帮助优化生产线、减少人工劳动并提高产品质量。这些机械臂非常适合用于自动工件移除、废料处理和包装等任务。
凭借高速度和高精度,机器人手臂可以执行精细的搬运任务,提高生产效率。主要优势包括
- 自动化繁重任务:减少人工劳动,降低成本。
- 提高质量:确保产品质量始终如一。
- 流畅的生产流程:自动将零件从模具移至指定位置。
此外,高速机械臂可加快生产周期,在速度和精度之间取得平衡,从而提高整体效率。
2. 制造业
在制造业,关节型机械臂被广泛用于焊接、装配、喷涂和材料处理。
- 焊接:机器人手臂可控制焊枪的位置和角度,确保焊接质量的一致性。
- 装配:灵活的关节运动使机械臂能够执行复杂的装配任务,取代人工并提高效率。
- 油漆和涂料:机器人手臂可精确控制喷涂设备,提供均匀、精细的涂层。
3. 医疗保健
在医疗保健领域,关节型机械臂主要用于手术机器人和康复机器人。这些机器人精度高,可协助外科医生进行微创手术或提供康复治疗。
- 手术机器人:例如,达芬奇手术系统(Da Vinci Surgical System)是一种铰接式机械臂,可协助外科医生进行复杂手术,提高精确度和患者安全性。
- 康复治疗:机器人手臂用于病人的物理治疗,为康复提供精确的运动指导。
结论
关节型机器人手臂具有精度高、灵活性强、应用广泛等特点,适用于各行各业。通过控制关节运动,它们可以高效地处理复杂任务、降低成本并确保高质量生产。
Samfacc 机械臂有助于优化生产线、减少人工劳动并确保产品质量的一致性。凭借高速度和高精度,这些机械臂大大提高了生产效率并简化了操作。 联系我们.Samfacc 团队随时准备满足您的所有自动化需求。



