高速机械臂是一种经过优化的工业机器人系统,可进行快速、重复性运动,并具有很高的定位精度。本文将介绍高速机械臂在实际生产环境中的工作原理,以及它们在当今工厂中发挥如此重要作用的原因。
自动化生产中的速度为何至关重要
在大批量生产中,速度直接影响单位成本。当生产周期以秒为单位时,哪怕只缩短一小段移动时间,也能显著提高日产量。
高速机械臂在多个方面促进了这一改进:
- 它能快速从模具或夹具中取出成品零件,减少机器闲置时间
- 与人工搬运不同,它能进行连贯的动作,不会造成疲劳
- 与上游和下游设备精确同步
例如,如果注塑工艺的周期时间在 3 至 6 秒之间,普通机械手将无法应对这种情况。高速机械手可以与机器的速度相匹配,甚至更好。
典型结构和运动
大多数高速机械臂解决方案都采用由伺服系统控制三到五个轴的型号。在执行简单的拾放功能时,通常首选三轴系统。当需要在旋转的同时插入零件时,则首选五轴系统。主要设计特点通常包括
- 伸缩臂结构可最大限度地减少移动距离
- 优化关节布局,减少不必要的运动
- 快速响应和精确反馈的伺服电机
这些特点使机器人能够在很短的时间内完成取放。在某些应用中,机器人的取放时间远低于一秒,因此适用于薄壁产品和其他快速循环物品。
常见应用场景
A 高速机器人手臂 很少是独立的设备。它的价值在于如何很好地集成到生产流程中。典型的应用场景包括
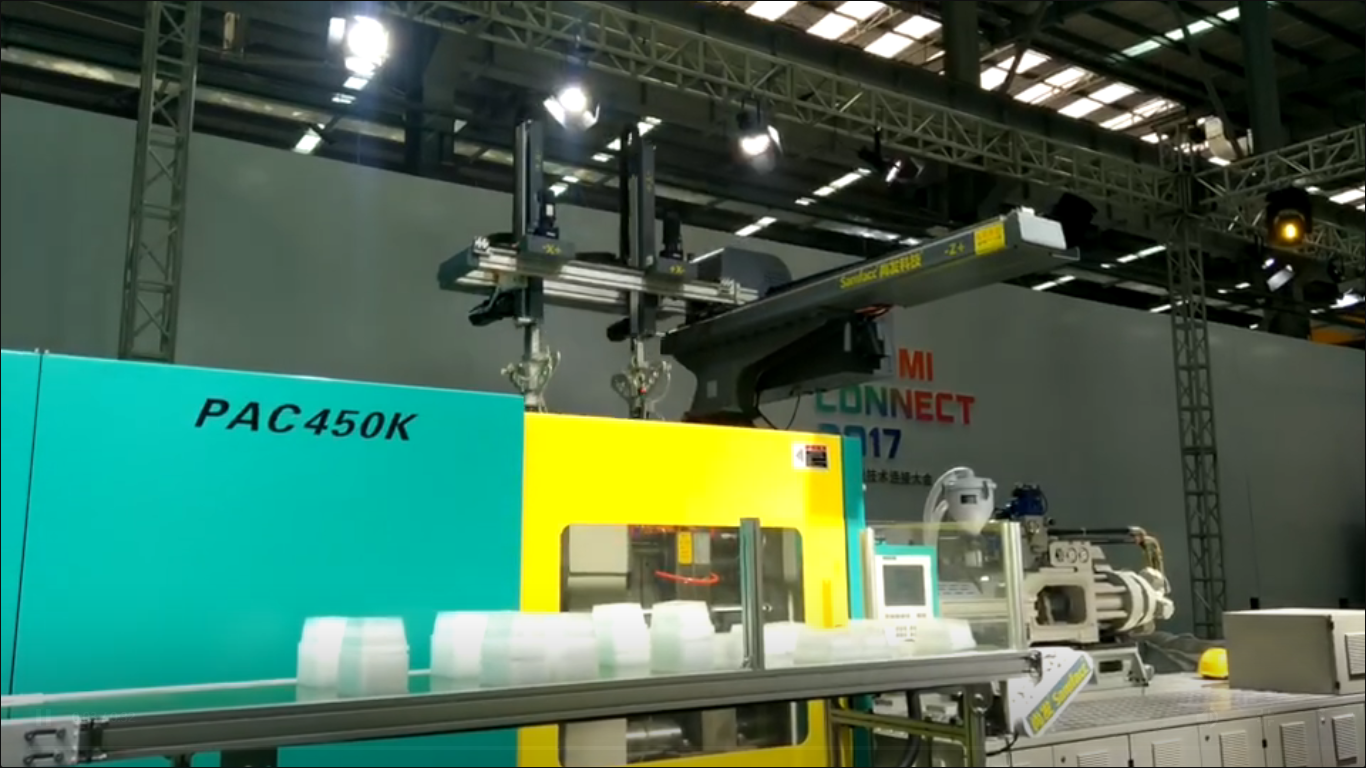
- 在注塑成型过程中,机器人会在模具打开后立即取出成型部件。这样做的目的是防止变形并缩短注塑过程的总周期时间。这类应用包括一次性包装、餐具和薄壁包装。
- 在电子制造领域,机械臂需要以精确度至关重要的速度处理最小、最轻的部件,因为这一过程中的任何迟疑都会造成装配线上的瓶颈。
- 在包装过程中,机器人参与分拣、码垛或快速传送过程。它们能够重复数千次相同的动作,因此非常适合标准化包装格式。
多臂和双级设计的作用
一些高速机械手臂系统采用双级或双臂设计,以进一步缩短循环时间。当一个机械臂在放置一个成品部件时,另一个机械臂则在为下一次拾取做准备。这种重叠运动策略最大限度地减少了操作之间的等待时间。
双级伸缩结构还使机器人能够深入机器内部,而不会增加整体占地面积。这在空间有限的紧凑型生产环境中尤为有用。
这些设计通常用于降解材料或堆叠模具产品的应用中,在这些应用中,必须对时间和零件处理进行严格控制。
高速运行时的精度和稳定性
仅有速度是不够的。高速机械臂必须保持稳定的运动和精确的定位。伺服控制系统在这方面发挥着至关重要的作用,它可根据编码器和传感器的反馈不断调整电机输出。
稳定的运动可确保部件不会掉落、刮伤或错位。这一点在处理薄型或精密部件时尤为重要。随着时间的推移,稳定的精度还能减少质量问题和返工率。
精心设计的系统可在速度和稳定性之间取得平衡,确保更快的周期不会导致更高的缺陷率。
能源效率和维护考虑因素
尽管高速机械臂系统运行速度很快,但现代设计的能效却越来越高。伺服电机主要在加速和运动过程中消耗功率,优化运动路径有助于最大限度地减少不必要的能源消耗。
从维护角度来看,这些机器人是为连续运行而设计的。高质量的机械部件和可靠的控制系统可减少磨损,延长维护周期。较低的维护要求直接转化为较少的停机时间和运营成本。
不同行业的灵活性
 高速机械臂的一个优势是适应性强。通过适当的编程和工具,同一个机器人通常可用于不同的产品线或流程。
高速机械臂的一个优势是适应性强。通过适当的编程和工具,同一个机器人通常可用于不同的产品线或流程。
例如 Samfacc's 高速机器人 SFK 系列 为复杂的运动提供了更大的灵活性。它们适用于单个周期内的角度插入、精确对准或多步操作等任务。这种灵活性使其在生产线中具有相当重要的地位。
结论
高速机械臂集快速移动、精确控制和可靠操作于一体,已成为现代自动化生产中不可或缺的工具。只要与正确的应用相匹配,它就能缩短周期、稳定质量并支持长期运行效率。
从 Samfacc 网站选择合适的高速机械手臂,提高生产效率,让制造更轻松。



